Содержание материала
- Определение и формула векторного произведения векторов
- Видео
- Свойства
- Свойства векторного произведения
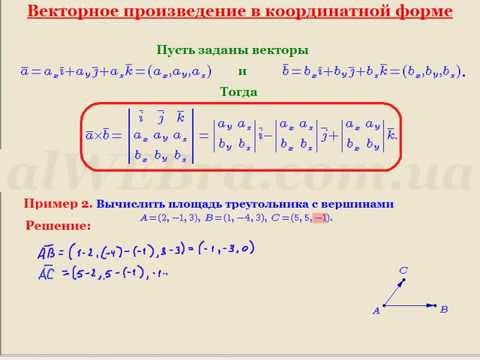
- Векторное произведение – примеры и решения
- Векторное произведение векторов в декартовых координатах
- Геометрические свойства векторного произведения
- Некоторые приложения векторного произведения Установление коллинеарности векторов
- Определение момента силы относительно точки
- Нахождение линейной скорости вращения
Определение и формула векторного произведения векторов
ОПРЕДЕЛЕНИЕВекторным произведением двух векторов и называется вектор , перпендикулярный к плоскости этих векторов и направленный так, что наименьший поворот от вектора к вектору происходит против хода часовой стрелки, если смотреть с конца вектора (рис. 1), причем

Если векторы  и
и  заданы своими координатами:
заданы своими координатами:  , то их векторное произведение вычисляется по формуле:
, то их векторное произведение вычисляется по формуле:

где  – орты координатных осей
– орты координатных осей  соответственно.
соответственно.
Если раскрыть этот определитель по первой строке:


то получаем, что

Задание Найти векторное произведение векторов и Решение Для нахождения векторного произведения составим определитель, в первой строке которого записаны орты координатных осей, а во второй и третьей строках координаты векторов и соответственно: Вычислим этот определитель, разложив его по элементам первой строки: Ответ
Свойства
- При изменении порядка множителей меняется знак на противоположный: $$ [\overline{a},\overline{b}] = -[\overline{b},\overline{a}] $$
- Вынос константы за знак произведения: $$ \lambda [\overline{a},\overline{b}] = [\lambda \overline{a}, \overline{b}] = [\overline{a}, \lambda \overline{b}] $$
- $$ [\overline{a}+\overline{b}, \overline{c}] = [\overline{a},\overline{c}] + [\overline{b}, \overline{c}] $$
Видео
Свойства векторного произведения
Векторное произведение в координатах представляется в виде определителя матрицы:

На основании свойств определителя можно легко обосновать свойства векторного произведения векторов:
- Антикоммутативность

- Свойство дистрибутивности

или

- Сочетательное свойство

или

, где λ произвольное действительное число.
Для большей ясности докажем свойство антикоммутативности векторного произведения.
По определению

и

Нам известно, что значение определителя матрицы изменяется на противоположное, если переставить местами две строки, поэтому

что доказывает свойство антикоммутативности векторного произведения.
Чтобы найти модуль векторного произведения векторов u и v нужно найти площадь параллелограмма, который построен на данных векторах: S = | u × v | = | u | * | v | * sinθ, где θ — угол между векторами.
Векторное произведение векторов u и v равно нулевому вектору, если u и v параллельны (коллинеарны): u × v = 0, если u ∥ v (θ = 0).
Векторное произведение – примеры и решения
В большинстве случаев встречаются три типа задач.
В задачах первого типа обычно заданы длины двух векторов и угол между ними, а нужно найти длину векторного произведения. В этом случае пользуются следующей формулой .
Найдите длину векторного произведения векторов a→ и b→, если известноa→=3, b→=5, ∠a→,b→=π4. Решение С помощью определения длины векторного произведения векторов a→ и b→ решим данную задач: a→×b→=a→·b→·sin∠a→,b→=3·5·sinπ4=1522. Ответ: 1522.
Задачи второго типа имеют связь с координатами векторов, в них векторное произведение, его длина и т.д. ищутся через известные координаты заданных векторов и .
Для такого типа задач, можно решить массу вариантов заданий. Например, могут быть заданы не координаты векторов и , а их разложения по координатным векторам вида и , или векторы и могут быть заданы координатами точек их начала и конца.
Рассмотрим следующие примеры.
В прямоугольной системе координат заданы два вектора a→=(2; 1; -3), b→=(; -1; 1). Найдите их векторное произведение. Решение По второму определению найдем векторное произведение двух векторов в заданных координатах:a→×b→=(ay·bz-az·by)·i→+(az·bx-ax·bz)·j→+(ax·by-ay·bx)·k→==(1·1-(-3)·(-1))·i→+((-3)·-2·1)·j→+(2·(-1)-1·)·k→==-2i→-2j→-2k→. Если записать векторное произведение через определитель матрицы, то решение данного примера выглядит следующим образом: a→×b→=i→j→k→axayazbxbybz=i→j→k→21-3-11=-2i→-2j→-2k→. Ответ: a→×b→=-2i→-2j→-2k→.
Найдите длину векторного произведения векторов i→-j→ и i→+j→+k→, где i→, j→, k→ — орты прямоугольной декартовой системы координат. Решение Для начала найдем координаты заданного векторного произведения i→-j→×i→+j→+k→ в данной прямоугольной системе координат. Известно, что векторы i→-j→ и i→+j→+k→ имеют координаты (1; -1; ) и (1; 1; 1) соответственно. Найдем длину векторного произведения при помощи определителя матрицы, тогда имеем i→-j→×i→+j→+k→=i→j→k→1-1111=-i→-j→+2k→. Следовательно, векторное произведение i→-j→×i→+j→+k→ имеет координаты (-1; -1; 2) в заданной системе координат. Длину векторного произведения найдем по формуле (см. в разделе нахождение длины вектора): i→-j→×i→+j→+k→=-12+-12+22=6. Ответ: i→-j→×i→+j→+k→=6..
В прямоугольной декартовой системе координат заданы координаты трех точек A(1,,1), B(,2,3), C(1,4,2) . Найдите какой-нибудь вектор, перпендикулярный AB→ и AC→ одновременно. Решение Векторы AB→ и AC→ имеют следующие координаты (-1; 2; 2) и (; 4; 1) соответственно. Найдя векторное произведение векторов AB→ и AC→, очевидно, что оно является перпендикулярным вектором по определению и к AB→ и к AC→, то есть, является решением нашей задачи. Найдем его AB→×AC→=i→j→k→-12241=-6i→+j→-4k→. Ответ: -6i→+j→-4k→. — один из перпендикулярных векторов.
Задачи третьего типа ориентированы на использование свойств векторного произведения векторов. После применения которых, будем получать решение заданной задачи.
Векторы a→ и b→ перпендикулярны и их длины равны соответственно 3 и 4. Найдите длину векторного произведения 3·a→-b→×a→-2·b→=3·a→×a→-2·b→+-b→×a→-2·b→==3·a→×a→+3·a→×-2·b→+-b→×a→+-b→×-2·b→. Решение По свойству дистрибутивности векторного произведения мы можем записать 3·a→-b→×a→-2·b→=3·a→×a→-2·b→+-b→×a→-2·b→==3·a→×a→+3·a→×-2·b→+-b→×a→+-b→×-2·b→ По свойству ассоциативности вынесем числовые коэффициенты за знак векторных произведений в последнем выражении: 3·a→×a→+3·a→×-2·b→+-b→×a→+-b→×-2·b→==3·a→×a→+3·(-2)·a→×b→+(-1)·b→×a→+(-1)·(-2)·b→×b→==3·a→×a→-6·a→×b→-b→×a→+2·b→×b→ Векторные произведения a→×a→ и b→×b→ равны 0, так как a→×a→=a→·a→·sin= и b→×b→=b→·b→·sin=, тогда 3·a→×a→-6·a→×b→-b→×a→+2·b→×b→=-6·a→×b→-b→×a→.. Из антикоммутативности векторного произведения следует -6·a→×b→-b→×a→=-6·a→×b→-(-1)·a→×b→=-5·a→×b→.. Воспользовавшись свойствами векторного произведения, получаем равенство 3·a→-b→×a→-2·b→==-5·a→×b→. По условию векторы a→ и b→ перпендикулярны, то есть угол между ними равен π2. Теперь остается лишь подставить найденные значения в соответствующие формулы: 3·a→-b→×a→-2·b→=-5·a→×b→==5·a→×b→=5·a→·b→·sin(a→,b→)=5·3·4·sinπ2=60. Ответ: 3·a→-b→×a→-2·b→=60.
Векторное произведение векторов в декартовых координатах
Теорема 3. Пусть два вектора a и b определены своими декартовыми прямоугольными координатами
| a={x1, y1, z1}, b={x2, y2, z2}. |
Тогда векторное произведение этих векторов имеет вид:
| [ab]={y1z2—y2z1, z1x2−z2x1, x1y2−x2y1}. | (3) |
Для запоминания формулы (3) удобно представить векторное произведение векторов в виде определителя:
 |
Раскрывая определитель по элементам первой строки мы получим разложение вектора a×b по базису i, j, k, которое эквивалентно формуле (3).
Доказательство теоремы 3. Составим все возможные пары из базисных векторов i, j, k и посчитаем их векторное произведение. Надо учитывать, что базисные векторы взаимно ортогональны, образуют правую тройку и имеют единичную длину (иными словами можно предполагать, что i={1, 0, 0}, j={0, 1, 0}, k={0, 0, 1}). Тогда имеем:
 | (4) |
Далее, учитывая, что a=x1i+y1j+z1k, b=x2i+y2j+z2k, и опираясь на свойства векторного произведения векторов, получим:
    |
Из последнего равенства и соотношений (4), получим:
  |
которая эквивалентна равенству (3).
Теорема доказана.
Геометрические свойства векторного произведения
1. Модуль векторного произведения численно равен площади параллелограмма, построенного на множителях (рис. 1.42,6).
2. Векторное произведение равняется нулевому вектору тогда и только тогда, когда множители коллинеарны, т.е.
 , в частности,
, в частности,  .
.Первое свойство следует из определения. Докажем второе свойство. Равенство  возможно в трех случаях:
возможно в трех случаях:  , или
, или  , или
, или  . В каждом из этих случаев векторы
. В каждом из этих случаев векторы  и
и  коллинеарны (см. разд. 1.1).
коллинеарны (см. разд. 1.1).

Пример 1.19. Вычислить площади параллелограмма и треугольника, построенных на векторах  , где
, где  , угол между векторами
, угол между векторами  и
и  равен
равен  (рис. 1.44).
(рис. 1.44).
Решение. Используя алгебраические свойства, найдем сначала векторное произведение

а затем его модуль  .
.
По первому геометрическому свойству векторного произведения искомая площадь параллелограмма равна  , а площадь треугольника в 2 раза меньше:
, а площадь треугольника в 2 раза меньше:  .
.
Некоторые приложения векторного произведения Установление коллинеарности векторов
Если  , то
, то  (и наоборот), т. е.
(и наоборот), т. е.

Определение момента силы относительно точки
Пусть в точке А приложена сила  и пусть О — некоторая точка пространства (см. рис. 20).
и пусть О — некоторая точка пространства (см. рис. 20).
Из физики известно, что моментом силы  относительно точки О называется вектор
относительно точки О называется вектор  , который проходит через точку О и:
, который проходит через точку О и:
1) перпендикулярен плоскости, проходящей через точки О, А, В;
2) численно равен произведению силы на плечо

3) образует правую тройку с векторами  . Стало быть,
. Стало быть, 

Нахождение линейной скорости вращения
Скорость  точки М твердого тела, вращающегося с угловой скоростью
точки М твердого тела, вращающегося с угловой скоростью  вокруг неподвижной оси, определяется формулой Эйлера
вокруг неподвижной оси, определяется формулой Эйлера  , где
, где  , где О — некоторая неподвижная точка оси (см. рис. 21).
, где О — некоторая неподвижная точка оси (см. рис. 21).